Our Robot
Meet the Machine
Five iterations. Laser-cut aluminum. A 360° turret. Every component designed, built, and programmed by our student team for the FTC DECODE challenge.
2025/26 Season - DECODE
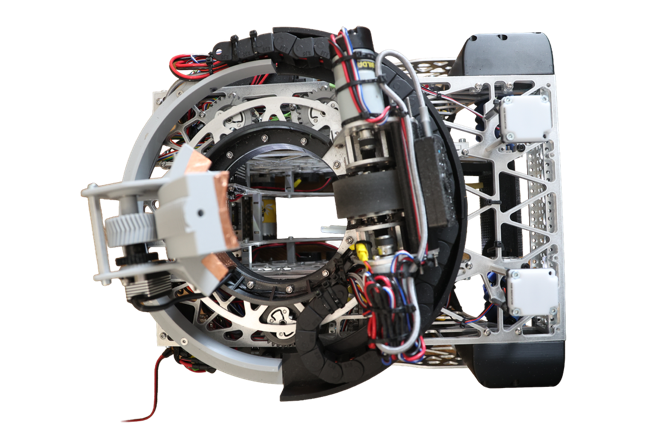
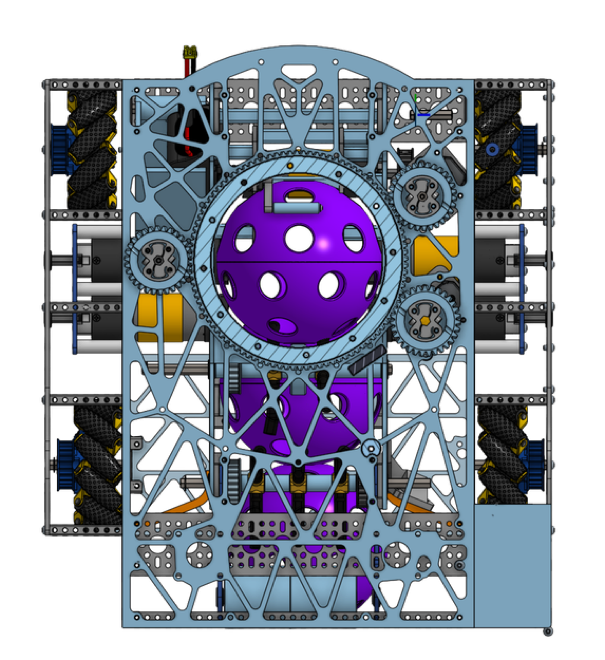
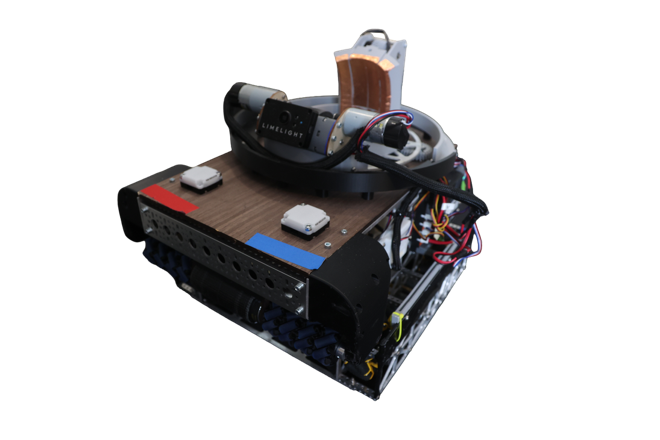
V5 — Express Delivery
Our most refined robot — built for speed, accuracy, and resilience. Features a custom belt drivetrain with a reduced 16×15 footprint, a rotatable turret with Limelight vision for precise targeting, vector wheel intake, adjustable hood flywheel, and a servo-actuated transfer system. The laser-cut aluminum body is pocketed for weight reduction and designed for rapid field repairs.
Design Evolution
5 Versions, 1 Season
From a heavy 18×18 tank to a refined aluminum machine — each iteration solved specific problems and pushed our design forward.
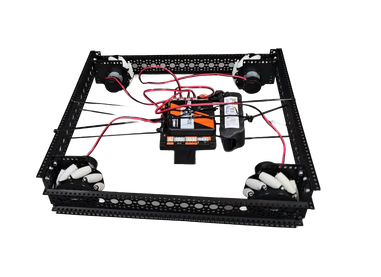
V1 — Shipping Container
Rubber band intake, fixed shooter, GoBILDA mecanum drivetrain. Built like a tank — heavy, exactly 18×18 footprint. Debuted at the Feynman Interleague Tournament.
V2 — Prototype
Built on the V1 platform with a rubber band intake, fixed shooter head, custom belt drivetrain, and our first adjustable hood. A prototyping phase iteration that informed later designs.
V3 — Swyft Experiment
Partial prototype exploring gecko wheel intake, fixed shooter head, Swyft drivetrain, and an indexing system. A brief but valuable test that shaped our drivetrain decisions.
V4 — Vis Celeris
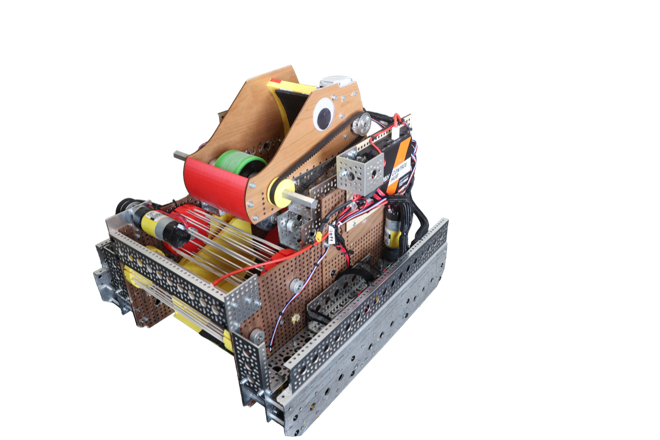
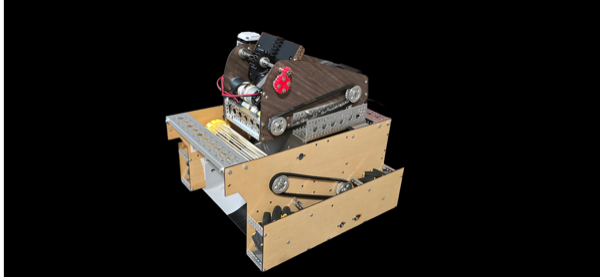
Fixed turret, vector wheel intake, custom belt drivetrain with adjustable hood. Part wood, part aluminum construction. Debuted at the Asimov Super Qualifier.
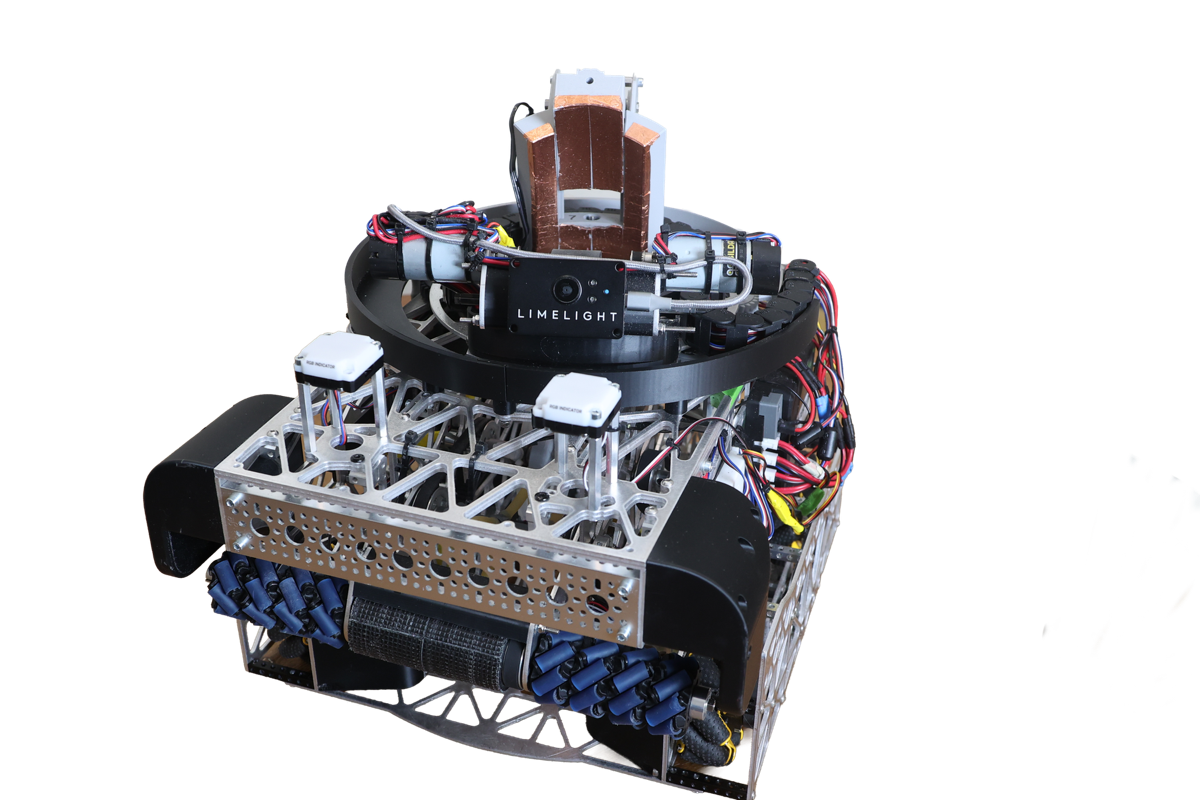
V5 — Express Delivery
Rotatable turret, vector wheel intake, custom belt drivetrain, adjustable hood, laser-cut aluminum body. Our most refined robot — purpose-built for speed and accuracy.
Software
Intelligent by Design
Field-centric drive, predictive shooting, and an action-based autonomous architecture — our software is as engineered as our hardware.
Shoot While Moving
Predicts the robot's future position using current velocity and artifact airtime, dynamically adjusting shooter RPM and hood angle. Allows accurate scoring under defensive pressure — increasing average TeleOp cycles from 11 to 13.
Auto-Position to Shoot Zone
Left trigger drives the robot to an optimal shooting position via an interpolated path inside the scoring zone. Saves ~1 second per cycle versus manual positioning.
Gate Avoidance
Redirects the movement vector to a safe direction around protection zones — smooth, non-disruptive, and invisible to the driver during gameplay.
Action-Based Autonomous
An action-based execution model where the robot executes independent actions (path following, intaking, shooting) that can be chained, branched, or interrupted dynamically based on sensor feedback, timing, and success/failure states.
Gallery
Up Close